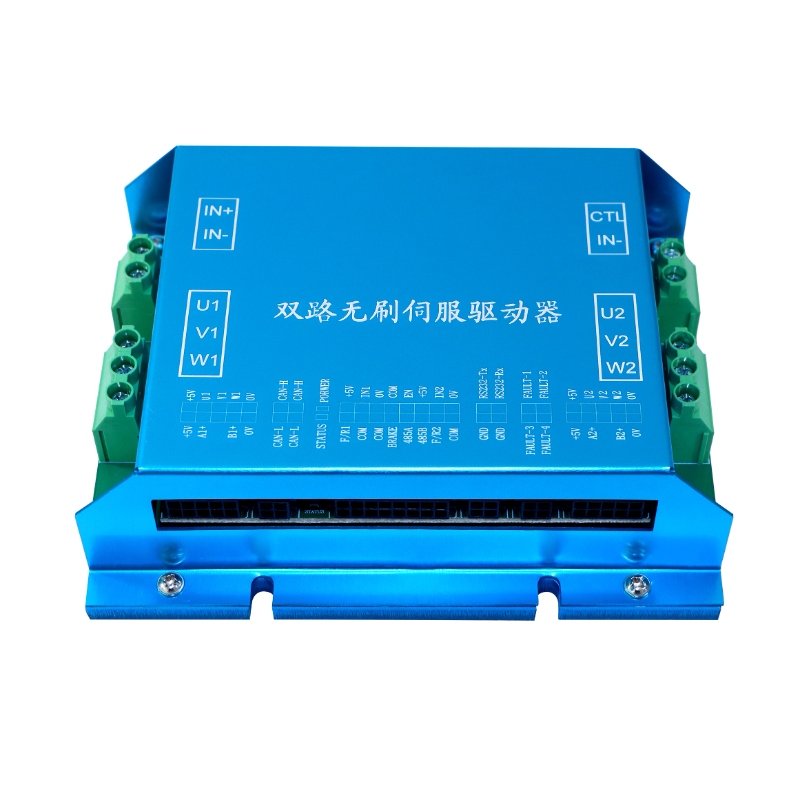
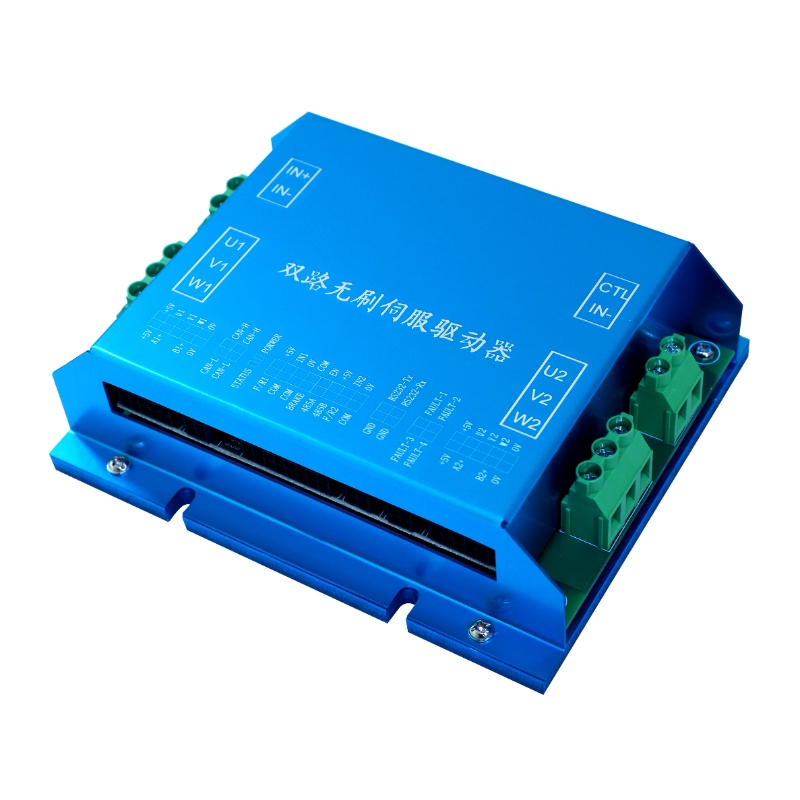
Controlador de motor sem escovas inteligente
Tensão de funcionamento: DC 24V/48V
Tensão de alimentação final: DC 16-55V
Potência do motor adaptável: 600W-1000W
Corrente nominal: 30A
Tempo de sobrecorrente: 500 ms
Feedback do sinal: codificador incremental, feedback Hall
Controlável de canal duplo independente.
Algoritmo de controlo de movimento PID inteligente.
Modo independente de motor duplo e modo misto.
Descrição do produto:
KYDBL4860-2E é umControlador inteligente de motor sem escovas. O driver de motor duplo sem escovas pode controlar dois motores CC sem escovas ao mesmo tempo. Adota MCU de alto desempenho de 32 bits e algoritmo de processamento de movimento avançado para realizar a função diferencial elétrica interna. O controlador utiliza o sinal Hall dentro do motor como feedback da posição do rotor e trabalha com o sinal do encoder incremental externo (linha 1000-2500) para controlar o movimento do motor, realizando os modos de malha aberta e malha fechada, o modo de posição e o modo de binário. Possui um chip de driver independente bidirecional, chip de processamento de encoder bidirecional, chip de processamento de sinal Hall bidirecional. Enquanto isso, possui múltiplas funções de alarme de falha.Possui dois modos de funcionamento: modo independente e modo misto.
Eumodo independente:Pode realizar o controlo totalmente independente do motor bidirecional, e a parte do sinal de controlo é controlada por sinais de entrada bidirecionais. O motor CC sem escovas bidirecional pode controlar a velocidade e a direção do motor em separado.
Mmodo fixo: Pode realizar o controlo síncrono (rotação para a frente, para trás, para a esquerda e para a direita) de dois motores sem escovas.
O sinal de controlo tem até 8 modos (comando sem fios, rocker, potenciómetro, grandeza analógica, frequência, largura de pulso, RS232, barramento CAN). 
Parâmetros do produto:
Modelo |
KYDBL4860-2E |
Parâmetros |
|
Tensão operacional |
CC 24 V/48 V |
Tensão de alimentação final |
CC 16-55V |
Potência do motor adaptável |
600W-1000W |
Corrente nominal |
30A |
InstantâneoMax.Current |
60A |
Tempo de sobrecorrente |
500 mS |
Feedback de sinal |
Codificador incremental, feedback Hall |
Modo de trabalho |
Modo de velocidade, modo de binário, modo de posição |
Método de arrefecimento |
Arrefecimento Natural |
Método de controlo |
RS232; CAN2.0; RC; 0-5V; PWM |
Temperatura de funcionamento. |
-25℃-+60℃ |
Temperatura de armazenamento. |
-35℃-+65℃ |
Propriedades isolantes |
A saída e a entrada estão isoladas a DC600V do chassis, a corrente de fuga é de 0,07mA e a resistência de isolamento é superior a 20MΩ. |
Propriedades de proteção |
À prova de poeira, à prova de humidade, à prova de névoa salina |
Função Protetora |
Atraso por sobrecorrente/Sobretensão/Subtensão/Sobreaquecimento/Curto-circuito |
Gama de velocidade controlável |
0-6000RPM |
Nível de proteção |
IP20 |
Dimensão |
190*130*45 mm |
Peso |
1,64 kg |
Padrão de chicote elétrico |
1 milhão |
Características do produto:
Entrada de tensão de ampla gama, 16-55 V, tensão limite máxima de 60 V.
Malha de controlo PID inteligente.
Modo de trabalho: controlo de malha aberta de velocidade, controlo de malha fechada, controlo de malha fechada de binário, controlo de malha fechada de posição.
Potenciómetro externo, modo de controlo de quantidade analógica de 0-5 V ou comando de impulsos, modo de controlo RC (sinal de largura de impulso emitido pelo recetor do controlo remoto de aeromodelismo).
Controlo de segurança para a frente e para trás, operação em quatro quadrantes, regeneração de suporte.
Active a função de controlo.
Controlo de corrente máxima.
Porta de entrada de 4 vias; a função pode ser definida como entrada analógica, entrada de impulsos ou funções de entrada digital.
Saída digital de 6 vias (tubo MOS de dreno aberto), que pode servir como saída de estado de alarme de falha do controlador e pode controlar o relé externo para realizar ações como a desconexão automática de alimentação.
Anormalidades como sobrecorrente, sobreaquecimento, sobretensão e curto-circuito irão desencadear a função de proteção.
Indicador LED de estado.
Comunicação de barramento CAN, consulte o protocolo de comunicação detalhado ao utilizá-lo.
Comunicação RS232, consulte o protocolo de comunicação detalhado ao utilizá-lo.
Comunicação USB, veja o protocolo de comunicação detalhado quando o utilizar.

Equipamento avançado e oficina:

Certificado:

PERGUNTAS FREQUENTES: