
Motor de junta robotizado
Tensão nominal: DC48-96V
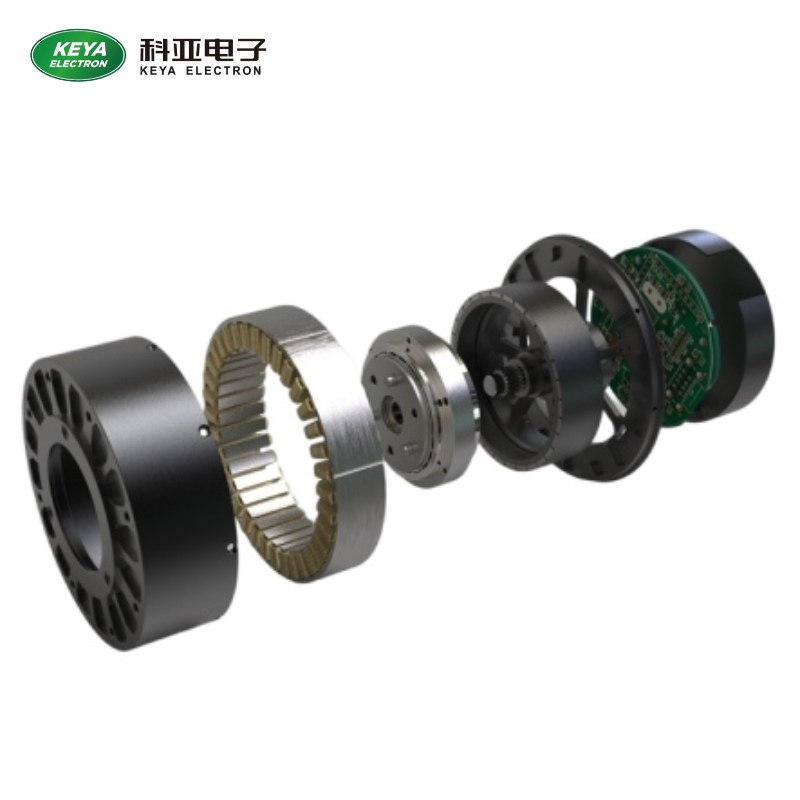
Dispositivo quatro em um (servomotor integrado, driver, codificador e redutor) com funcionamento estável.
Baixa velocidade, alto torque, bom desempenho dinâmico e alta precisão de controle.
Múltiplas funções de proteção garantem um bom funcionamento.
Suporte à personalização.
Parâmetros do produto:
Modelo |
KY96BL04035-15 |
KY160BL0405-06 |
Parâmetros |
||
Tensão nominal |
CC 48V | |
|
Potência nominal |
350W |
530W |
Corrente nominal |
10,3-A |
18,5-A |
Velocidade de saída |
258RPM |
100RPM |
Torque nominal |
13N·m |
50N·m. |
Max.Current instantâneo |
20º-A |
37º-A |
Max.Torque instantâneo |
30N·m |
160N·m |
Número de Polos |
30 |
32 |
Parte de feedback |
Codificador absoluto |
|
Método de controlo |
RS232 / CAN2.0 / CANopen |
|
Rácio de Redução |
1:6 |
|
Modo de trabalho |
Modo de velocidade, modo de torque, modo de posição |
|
Peso |
0,85 kg |
2,95 kg |
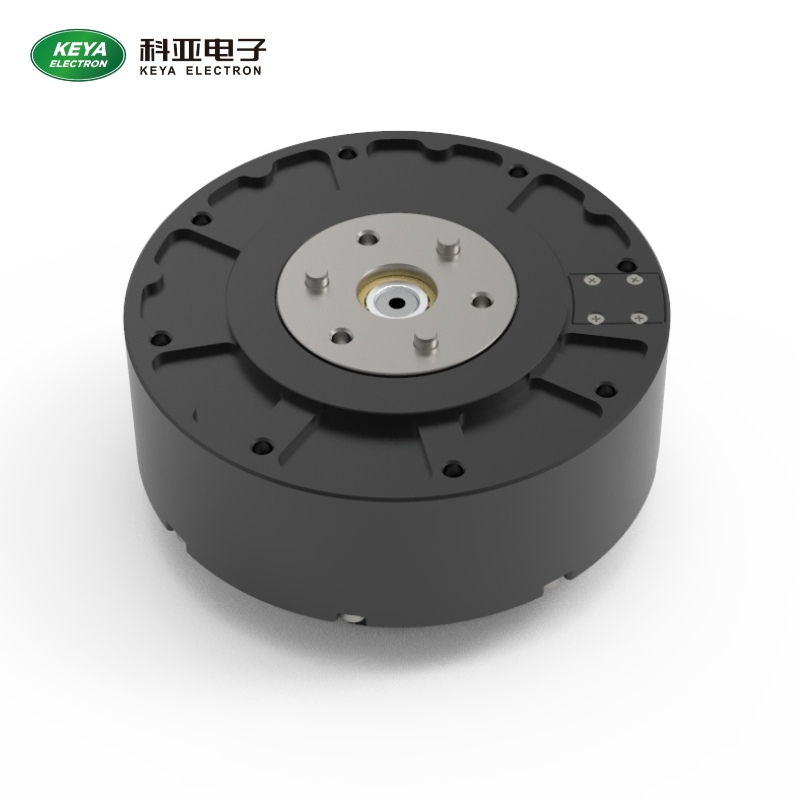
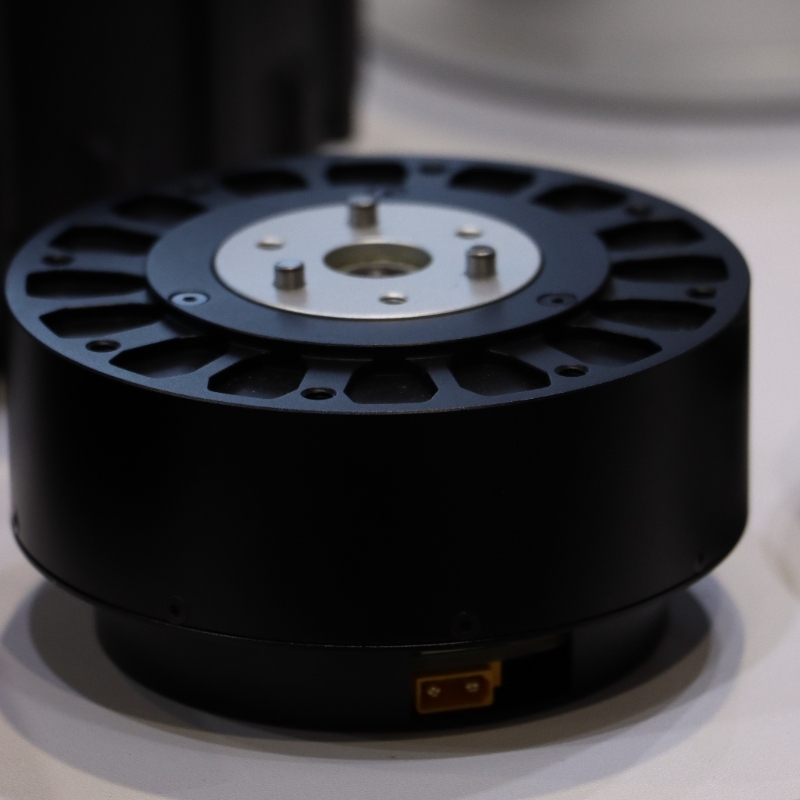
Desenho do produto: